宝马新7系G11/G12底盘车型的辅助系统解读(13)
BMWCHE/2016-01-08/ 分类:技术解析/阅读:
十八、驻车操作辅助系统 驻车操作辅助系统 PMA 可为驾驶员提供多方面的支持。一方面辅助系统可以测量停车位大小并根据测量 结果确定停车位是否够大 ...
十八、驻车操作辅助系统
驻车操作辅助系统 PMA 可为驾驶员提供多方面的支持。一方面辅助系统可以测量停车位大小并根据测量结果确定停车位是否够大。另一方面可减少驾驶员停车入位的操作。在 G11/G12 上,驻车操作辅助系统
(SA 5DP)作为选装配置提供,只能与选装配置倒车摄像机(SA 3AG)一起订购。
1、系统组件
重要传感器和操作元件概览:
• 驻车辅助按钮是驻车操作辅助系统 PMA 的主要操作部件(序号 8)。
• 前部保险杠内的两个附加超声波传感器负责在行驶期间测量停车位(序号 1)。
• 通过后部保险杠饰板内的四个超声波传感器和前部保险杠饰板内的另外四个超声波传感器测量与障碍物的距离(序号 11 和 19)。
• 通过位于后部保险杠内的另外两个超声波传感器在停车入位过程中准确探测横向停车位。通过附加 PDC 传感器测量与所识别目标的距离。
G11/G12 驻车操作辅助系统 PMA 的系统组件见下图:
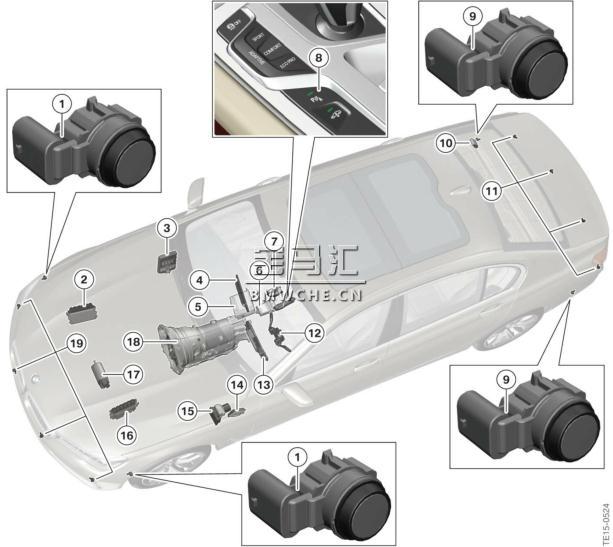
1 驻车操作辅助系统超声波传感器
2 数字式发动机电子系统 DME
3 车身域控制器 BDC
4 中央信息显示屏 CID
5 Headunit High 2 HU-H2
6 碰撞和安全模块 ACSM
7 控制器 CON
8 驻车辅助按钮
9 后部侧面驻车距离监控系统超声波传感器
10 驻车操作辅助系统 PMA 控制单元
11 后部驻车距离监控系统超声波传感器
12 转向柱开关中心 SZL
13 组合仪表 KOMBI
14 选装配置系统 SAS 控制单元
15 动态稳定控制系统 DSC
16 数字式发动机电子系统 2 DME2
17 电子助力转向系统 EPS
18 变速箱电子控制系统 EGS
19 前部驻车距离监控系统超声波传感器
2、系统电路图
以下系统电路图展示了驻车和掉头时使用的所有系统组件。根据车辆配置也可能安装部分系统组件。
G11/G12 驻车和掉头系统电路图见下图:
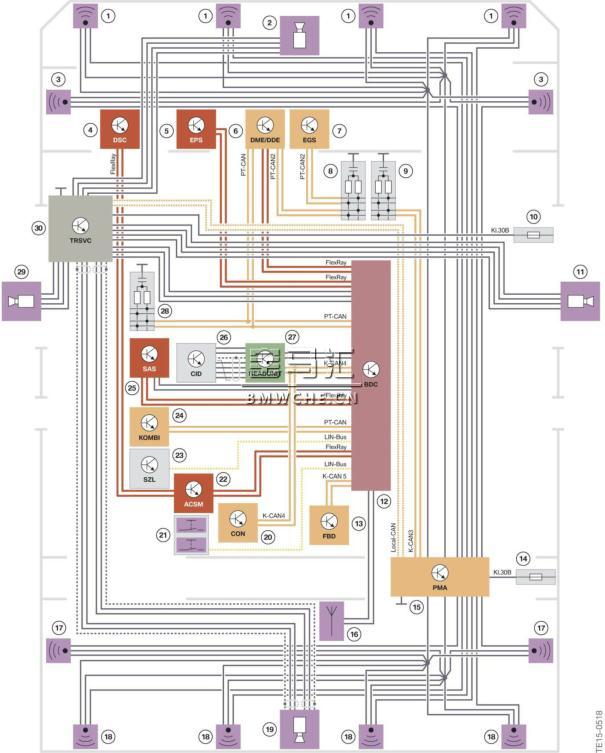
1 前部驻车距离监控系统超声波传感器
2 前部摄像机
3 驻车操作辅助系统超声波传感器
4 动态稳定控制系统 DSC
5 电子助力转向系统 EPS
6 数字式发动机电子系统 DME/数字式柴油机电子系统 DDE
7 变速箱电子控制系统 EGS
8 CAN 终端电阻
9 CAN 终端电阻
10 右前配电盒内的保险丝
11 右侧侧视摄像机
12 车身域控制器 BDC
13 遥控信号接收器 FBD
14 右后配电盒内的保险丝
15 驻车操作辅助系统 PMA 控制单元
16 遥控驻车天线
17 后部侧面驻车距离监控系统超声波传感器
18 后部驻车距离监控系统超声波传感器
19 倒车摄像机 RFK
20 控制器 CON
21 用于启用摄像机的驻车辅助按钮和操作按钮
22 碰撞和安全模块 ACSM
23 转向柱开关中心 SZL
24 组合仪表 KOMBI
25 选装配置系统 SAS 控制单元
26 中央信息显示屏 CID
27 Headunit High 2 HU-H2
28 CAN 终端电阻
29 左侧侧视摄像机
30 顶部后方侧视摄像机 TRSVC 控制单元
3、控制单元
在带有选装配置驻车操作辅助系统(SA 5DP)的车辆上,通过 PMA 控制单元提供驻车距离监控系统PDC 和驻车操作辅助系统功能。
G11/G12 驻车操作辅助系统 PMA 控制单元见下图:

4、工作原理
驻车操作辅助系统 PMA 可辅助停入与道路平行(纵向停车)和垂直(垂直停车)的停车位。为此,在以约 35 km/h 以下车速驶过时,无论之前是否启用,系统都会对可能的停车位进行测量。
通过集成在前部车轮罩内的两个附加超声波传感器测量停车位。这两个传感器与驻车操作辅助系统 PMA控制单元连接,在该控制单元内还执行驻车距离监控系统 PDC 功能。这两个超声波传感器的功能与驻车距离监控系统 PDC 相似。即发出超声波脉冲并接收回声脉冲。
为在停车入位过程中准确探测垂直停车位,在 G11/G12 后部保险杠内装有另外两个超声波传感器。通过附加 PDC 传感器测量与所识别目标的距离。
只要发现了长度和宽度满足要求的停车位且系统已经启用,就会在中央信息显示屏 CID 内显示该车位。
在接下来的过程中由驻车操作辅助系统 PMA 负责包括转向、制动和选档的整个车辆操控。
在此也会将并非通过两辆车限定的空间识别为停车位。因此也可在一个目标后停车入位。
监控车辆周围情况仍像以前一样是驾驶员的责任所在。根据车辆周围情况的需要,驾驶员可随时对自动停车入位操作进行干预。在搜索停车位和停车入位过程中驾驶员可通过集成显示获得有关停车位本身、停车入位辅助状态和相应处理说明以及与其他目标距离的所有信息。
个人责任:
• 通过直接观察监控车位和停车入位过程并在必要时进行干预,否则有发生事故的危险。
• 系统不考虑已测量停车位所发生的变化。
• 在停车入位过程中系统不考虑伸出车外的载重。
• 驻车操作辅助系统 PMA 可能会在转向过程中跨越或撞到路沿。因此必须确保可以随时进行干预,否则可能会造成车轮和轮胎或车辆损坏。
驻车操作辅助系统 PMA 无法替代驾驶员本人对停车入位过程负责。因此必须确保可以随时主动进行干预,以免发生危险。
5、工作条件
执行驻车操作辅助系统 PMA 功能需要满足以下基本前提:
• 车门必须处于关闭状态。
• 行李箱盖必须处于关闭状态。
• 驾驶员必须系上安全带。
• 驻车制动器必须已松开。
(1)测量停车位
可在行驶期间测量停车位。为此需要注意以下参数:
• 向前直线行驶车速不超过约 35 km/h
• 与停车列的最大距离为 1.5 米。
探测路沿
例如如果搜索停车位时在超声波传感器探测范围内探测到路沿,大多数情况下会将其识别为与道路平行的停车位。
搜索与道路垂直的停车位时,路沿大多数情况下不在超声波传感器的探测范围内(探测范围约为 4.2米)。
G11/G12 通过超声波传感器探测路沿见下图:
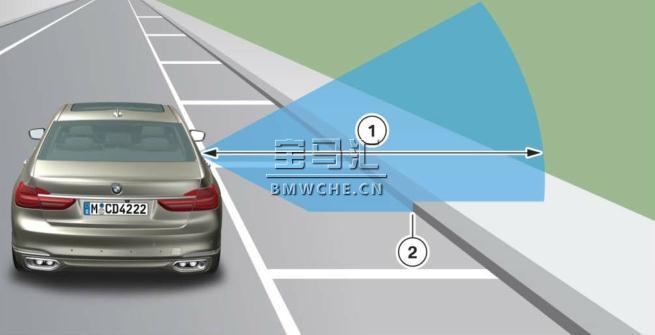
1 探测范围约为 4.2 米,超声波传感器的垂直探测角度为 ± 30°
2 探测路沿
(2)与道路平行的合适停车位(纵向停车)
G11/G12 纵向停车原理见下图:
G11/G12 纵向停车原理见下图:


车辆探测的目标最小长度必须约为 0.5 米。目标长度为 0.5 米时,PMA 传感器还需要通过探测路沿来确定此为纵向停车位,从而停入纵向停车位内。
G11/G12 纵向停车的停车位要求见下图:

1 与停车列或目标的最大距离为 1.5 米
2 超声波传感器的水平探测角度为 ± 40°,探测范围约为 4.2 米
3 停车位长度 = 车辆长度 + 约 0.8 米
4 目标或车辆长度至少为 0.5 米
(3)与道路垂直的合适停车位(垂直停车)
G11/G12 垂直停车原理见下图:

驾驶员必须自行判断垂直停车位的深度。由于存在技术限制,系统只能大致确定垂直停车位的深度。
G11/G12 垂直停车的停车位要求见下图:

1 与停车列的最大距离为 1.5 米
2 超声波传感器的水平探测角度为 ± 40°,探测范围约为 4.2 米
3 停车位最小深度为自身车辆长度
4 车辆或目标宽度至少为 0.5 米
5 停车位宽度 = 车辆宽度 + 约 0.7 米,最大不超过 5 米
不同垂直停车位
G11/G12 垂直停车位见下图:

1 两辆轿车之间的标准停车位
2 与柱状物之间的停车位(地下停车场)
3 与障碍物之间的停车位(公共停车场)
(4)探测通用型停车位
由于存在系统技术限制,车辆无法始终识别出正确停车位。因此可能会错误识别停车位或将不适用的停车场或非停车位识别为停车位。
下图展示了可能表示上述内容的一种情况。
G11/G12 探测通用型停车位见下图:

所探测的停车位大小既适合垂直于道路也适合平行于道路停车入位。由于没有路沿,车辆无法准确确定停车位。系统提示存在通用型停车位。在此情况下驾驶员必须自行决定如何停入车位。
车辆探测到通用型停车位时,在中央信息显示屏 CID 内出现以下显示。
G11/G12 CID 内的通用型停车位显示见下图:

6、侧面保护
侧面保护功能提醒车辆侧面有障碍物,从而在驶入和驶出停车位以及掉头时为驾驶员提供支持。
G11/G12 侧面保护见下图:

通过分别集成在前部和后部保险杠侧面的两个超声波传感器测量与障碍物的距离。车辆自身移动会使传感器所识别的障碍物形成沿车辆侧面的运动轨迹。这会在中央信息显示屏 CID 内显示出来,在可能发生碰撞的情况下还会发出一个声音警告。
G11/G12 CID 内的侧面保护视图见下图:

系统不考虑接近静止车辆的障碍物,因为在此情况下系统无法进行正确分析。识别前提是车辆自身移动。
在中央信息显示屏 CID 内显示的距离标记在停车后显示约 13 秒。只有车辆移动后才会重新显示距离标记。
7、操作方式
原则上可通过两种方式启用驻车操作辅助系统 PMA:
• 通过驻车辅助按钮启用
• 通过“挂入倒车档”之后“操作 iDrive 控制器”启用。
通过驻车辅助按钮启用
通过中控台上的驻车辅助按钮启用时会在中央信息显示屏 CID 内显示驻车辅助菜单。只要发现停车位就会向驾驶员提供处理说明,通过系统支持帮助其完成驻车过程。在自动停车入位过程中驾驶员必须一直按住驻车辅助按钮直至停车入位过程完成。
G11/G12 带驻车辅助按钮的开关组件见下图:

1 驻车辅助按钮
通过“挂入倒车档”之后“操作 iDrive 控制器”启用挂入倒车档时会在中央信息显示屏 CID 内显示驻车辅助菜单和停车位搜索状态。但此时尚未启用驻车操作辅助系统 PMA。驾驶员可通过中央信息显示屏 CID 功能栏内的驻车操作辅助系统 PMA 符号注意到这一点。为了借助系统支持完成停车入位,必须使用控制器在中央信息显示屏 CID 功能栏内选择相应符号从而启动停车入位过程。在自动停车入位过程中驾驶员必须一直按住驻车辅助按钮直至停车入位过程完成。
(1)驻车过程(纵向停车)
随后在中央信息显示屏 CID 内通过驻车辅助系统符号右下方的一个对钩向驾驶员显示驻车辅助系统处于启用状态。
如果行驶期间通过驻车辅助按钮启用了驻车操作辅助系统 PMA,就会在 CID 内通过停车位搜索提示驾驶员注意。找到一个停车位时就会在中央信息显示屏 CID 内的相应一侧进行显示。同时驾驶员会看到停车提示。
G11/G12 通过 PMA 执行驻车过程(纵向停车)见下图:

系统提示驾驶员通过操作相应方向的转向信号灯对停车位进行确认。
G11/G12 通过 PMA 执行驻车过程(纵向停车)见下图:

现在可通过操作驻车辅助按钮启动停车入位过程。必须按住驻车辅助按钮。之后驾驶员必须松开制动踏板。
G11/G12 通过 PMA 执行驻车过程(纵向停车)见下图:

仍然按压按钮直至驻车过程结束。
G11/G12 通过 PMA 执行驻车过程(纵向停车)见下图:

完成后通过信号音和相关信息提示驾驶员停车入位过程已完成。驻车操作辅助系统 PMA 挂入 P 档以防车辆溜车。
G11/G12 通过 PMA 执行驻车过程(纵向停车)见下图:

(2)驻车过程(垂直停车)
下图展示了垂直停车过程。
G11/G12 通过 PMA 执行驻车过程(垂直停车)见下图:

(3)关闭标准
手动关闭标准
可根据需要随时停用驻车操作辅助系统 PMA。驾驶员可使用控制器在中央信息显示屏 CID 功能栏内选择相应符号从而停用系统。此外也可通过松开 iDrive 控制器旁开关组件内的驻车辅助按钮来停用驻车操作辅助系统 PMA。
出现故障时,会在中央信息显示屏 CID 内显示一条检查控制信息(“驻车辅助系统失灵。请相关人员检查系统。”)。
自动关闭标准
出现以下情况时就会自动关闭驻车操作辅助系统 PMA:
• 松开驻车辅助按钮时
• 握紧方向盘或自动转向时
• 选择与控制显示说明不符的档位时
• 加速时
• 拉紧驻车制动器时
• 接通与所需停车侧相反的转向信号灯时
• 车速超过约 10 km/h 时
• 路面有积雪或路面光滑时
• 行李箱盖打开时
• 遇到无法跨越的障碍物时,例如路沿
• 突然出现障碍物时
• 超过停车入位进程或停车入位持续时间最大数值时。
8、系统限制
目标识别受到超声波测量物理学规律的限制。下面列举了一些出现这种情况的示例:
• 使用挂车牵引杆和牵引钩时
• 物体比较纤细或呈楔形时
• 物体处于高处且突出,例如墙体伸出部分或装载物
• 物体带有角和尖锐棱边
• 物体带有精细表面或结构,例如栅栏。
发出持续音之前或之后,已显示的低矮物体(例如路沿)可能会进入传感器的死角区域。无法识别位于高处、突出的物体,例如墙体伸出部分。也可能会识别出这种并不合适的停车位。
例如出现以下情况时也可能存在其他功能限制:
• 传感器有污物或结冰
• 大雾、大雨或大雪
• 路面不平,例如碎石路面
• 路面光滑
• 上坡或下坡坡度较大
• 停车位内有树叶堆积或雪堆。
为确保功能完全正常,必须保持超声波传感器洁净且未结冰。使用高压清洗设备清洁传感器时,应避免高压水束直接且长时间对着传感器。此外,使用高压清洗设备时应与传感器保持至少 30 厘米的距离。
驻车操作辅助系统 PMA 无法替代驾驶员本人对交通情况做出判断。驾驶员也要通过直接观察监督车辆周围的交通情况。否则可能撞到驻车距离监控系统 PDC 识别范围外的道路使用者或物体。车内和车外声音较大的声源可能会压过驻车操作辅助系统 PMA 或驻车距离监控系统 PDC 的信号音。
网站声明 1、本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享。
2、本网站所提供的信息,只供参考之用,本网站不保证信息的准确性、有效性、及时性和完整性。
3、如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,bmw@bmwche.cn 我们会及时修改或删除。
2、本网站所提供的信息,只供参考之用,本网站不保证信息的准确性、有效性、及时性和完整性。
3、如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,bmw@bmwche.cn 我们会及时修改或删除。
TAG:
阅读: 扩展阅读:
推荐文章
Recommend article-

大BOSS来临!全新宝马X7的发动机和底盘技术解析
技术解析/阅读:7068 -

技术解析三缸发动机与四缸发动机的差距到底在哪
技术解析/阅读:2069 -

王位继承者 替代S55的全新S58直列6缸发动机解析
技术解析/阅读:11093 -

最强六缸汽油机!解读宝马X3 M、X4 M S58发动机
技术解析/阅读:2221 -

并不是为了装饰!宝马内侧大灯不亮的原因
技术解析/阅读:3409 -

动力再提升 宝马M2 3.0T发动机解析
技术解析/阅读:1646

热门文章
HOT NEWS