
宝马点火缺火、发动机运行不稳定、有熄火倾向解析
机电Technician/2019-08-19/维护维修/阅读:次
发动机安静、无故障地运行,并且在大部分转速范围内均无振动时,称为运行平稳。燃烧不均匀时尤其会产生运行不稳定现象 (不均匀运转状态)。
当达到某个特定的运转平稳性数值时可以认定存在熄火 (最可能的原因)。
运行不稳定数值高也可能是因驱动系内的振动引起的,而这又可能是由不良路段上的路况导致的。
驱动系内的振动与熄火可通过不良路段识别来区分。
通过曲轴传感器采集曲轴的转数、加速和位置(例如上止点),并且对持续分析运转平稳性数值。
数字式发动机电子伺控系统 (DME) 又通过运转平稳性数值识别熄火。但是如有可能,运转平稳性数值仅在怠速状态下或处于规定的集成等级时由发动机控制输出。
部件简短描述;曲轴传感器集成在曲轴箱壳体盖内。曲轴传感器借助一个拧在飞轮上的多极传感轮探测曲轴位置 (例如上止点)。
数字式发动机电子伺控系统 (DME) 据此计算发动机转速和最佳的燃油喷射时刻。曲轴传感器连同凸轮轴传感器一起,是全顺序喷射装置所必需的 (与气缸中的点火时刻最佳协调的燃油喷射)。
另外还通过曲轴加速度采集曲轴的不均匀运转状态 (运行不稳定),并在数字式发动机电子伺控系统 (DME) 中进行分析。不均匀运转状态 (运转平稳性数值) 可以被分配给各个气缸,是判断燃烧质量的一个指标。
多极传感轮具有58个磁极对和1个参考点。多极传感轮的参考点是一个双倍长度的磁极。从高相位到低相位的过渡标志着磁场的变化。在数字式发动机电子伺控系统 (DME) 中对这些变化进行计数。磁场两次切换之间的偏差为 6° 曲轴转角。
通过该基准点,可识别出第 1 个气缸的上死点。通过监控各个磁极对,曲轴每转一圈,霍尔传感器就向数字式发动机电子伺控系统 (DME) 发送一定数量的信号。
所谓的主动时样曲轴传感器还负责识别曲轴的旋转方向以及与多极传感轮之间的空气间隙。
- 曲轴传感器和凸轮轴传感器发出的信号没有错误
- 必须按规定的时间顺序识别到这两个信号。
这一步骤称为同步过程,并仅在车辆起动时执行。首先,同步使数字式发动机电子伺控系统 (DME) 能够正确控制燃油喷射。不同步时不能起动车辆。
发动机起动时(第 1圈曲轴旋转时),曲轴传感器信号缺失,或识别出无效同步,便会存储一个故障。
点火缺火识别 (熄火)
熄火不会被直接识别,例如通过气缸内的压力传感器和温度传感器,而是间接通过曲轴的不均匀运转状态(运转平稳性数值)。
在各个气缸中每次点火和燃烧混合气时均会稍稍加速曲轴,并在换气期间又再次将其稍微制动。如果加速力增加,则转速也会增加,直到加速和制动之间重新达到平衡。
针对 8 缸发动机,在 2 个工作周期 (720° 曲轴角) 内进行 8 次燃烧周期。即,每次燃烧可以分配到 90° 曲轴角度的扇形区 (= 点火间距)。因此,燃烧周期可以分配给各个气缸,并可以相互比较。如果所有气缸都达到理论上的均匀燃烧,那么每个扇形区/每个气缸的燃烧周期持续时间始终都是相等的。
6 缸发动机示例:在 2 个工作周期内 (720° 曲轴角度) 进行 6 次燃烧周期。每次燃烧可以被分配 120° 曲轴角度的扇形区 (720° 除以 6 = 120°)。
例如下列原因可能导致运转平稳性数值升高:
- 喷油量偏差 (喷油嘴故障)
- 混合气浓度偏差 (过剩空气)
- 缓慢的燃烧(火花塞、点火线圈)
- 不同的汽缸进气(例如进气道积碳、过剩空气)
- 不同的压缩、缺少压缩
- 不一致的气缸列增压(废气涡轮增压器)
当达到某个特定的运行平稳性数值时 (综合特性曲线值作为发动机转速、负荷和冷却液温度的函数),可以认定存在熄火 (最可能的原因)。当熄火达到一定次数时 (失火计数器),将存储下类型为“识别到气缸 1 熄火”的故障。
为保护触媒转换器,可能需要额外关闭相应气缸上的燃油喷射。
但对于熄火,该故障记录的实际故障原因并不明确。即使存储了例如气缸 1 熄火,该气缸 1 上的部件仍有可能没有故障。
平均值与较高的加速度的偏差得到正的运转平稳性数值。平均值与较高的减速度的偏差得到负的运转平稳性数值。
故障查询时将在测试模块中对各个气缸的运转平稳性数值进行分析,并显示在各个控制单元功能中。为了产生有说服力的数值,发动机必须在怠速下运行至少 3 分钟。但是,运转平稳性数值显示功能必要时仅在怠速下工作,与发动机温度无关。可识别单个燃烧不良的气缸。个别气缸运转平稳性数值的偶然波动可以通过详细观察数值来识别。
一个周期 (720° 曲轴) 的运转平稳性数值总和在恒定转速下为 0。实际上,会出现与总和值 0 较小的偏差。这重新又会导致通常几乎难以察觉的小转速波动。
不良路段识别
不良路段识别根据传输给 DME 的各个车轮的加速度识别在不良路段上的不良路段运行 (驶过石头、碎石或坑洞)。
车轮转速波动可引起驱动系内的振动,并导致类似于熄火的曲轴不均匀运转状态。
在识别到不良路段时会存储一个故障并短时关闭点火缺火识别。出现的运转平稳性数值大概率是由驱动系振动,而不是由熄火引起的。
如果不良路段识别工作太晚 (直至错误地识别到熄火之后),则存在关于熄火和不良路段识别的故障记录。在这些情况下,应忽略关于熄火的故障记录,不需要任何维修措施。
当达到某个特定的运转平稳性数值时可以认定存在熄火 (最可能的原因)。
运行不稳定数值高也可能是因驱动系内的振动引起的,而这又可能是由不良路段上的路况导致的。
驱动系内的振动与熄火可通过不良路段识别来区分。
通过曲轴传感器采集曲轴的转数、加速和位置(例如上止点),并且对持续分析运转平稳性数值。
数字式发动机电子伺控系统 (DME) 又通过运转平稳性数值识别熄火。但是如有可能,运转平稳性数值仅在怠速状态下或处于规定的集成等级时由发动机控制输出。
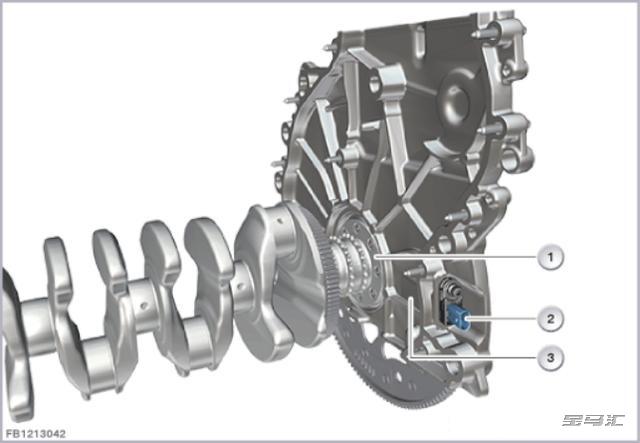
部件简短描述;曲轴传感器集成在曲轴箱壳体盖内。曲轴传感器借助一个拧在飞轮上的多极传感轮探测曲轴位置 (例如上止点)。
数字式发动机电子伺控系统 (DME) 据此计算发动机转速和最佳的燃油喷射时刻。曲轴传感器连同凸轮轴传感器一起,是全顺序喷射装置所必需的 (与气缸中的点火时刻最佳协调的燃油喷射)。
另外还通过曲轴加速度采集曲轴的不均匀运转状态 (运行不稳定),并在数字式发动机电子伺控系统 (DME) 中进行分析。不均匀运转状态 (运转平稳性数值) 可以被分配给各个气缸,是判断燃烧质量的一个指标。
多极传感轮具有58个磁极对和1个参考点。多极传感轮的参考点是一个双倍长度的磁极。从高相位到低相位的过渡标志着磁场的变化。在数字式发动机电子伺控系统 (DME) 中对这些变化进行计数。磁场两次切换之间的偏差为 6° 曲轴转角。
通过该基准点,可识别出第 1 个气缸的上死点。通过监控各个磁极对,曲轴每转一圈,霍尔传感器就向数字式发动机电子伺控系统 (DME) 发送一定数量的信号。
所谓的主动时样曲轴传感器还负责识别曲轴的旋转方向以及与多极传感轮之间的空气间隙。
1、多极传感轮
2、芯插头连接
3、曲轴传感器
2、芯插头连接
3、曲轴传感器
曲轴传感器和凸轮轴传感器信号的同步
为起动发动机,数字式发动机电子伺控系统 (DME) 检查下列条件是否满足:- 曲轴传感器和凸轮轴传感器发出的信号没有错误
- 必须按规定的时间顺序识别到这两个信号。
这一步骤称为同步过程,并仅在车辆起动时执行。首先,同步使数字式发动机电子伺控系统 (DME) 能够正确控制燃油喷射。不同步时不能起动车辆。
发动机起动时(第 1圈曲轴旋转时),曲轴传感器信号缺失,或识别出无效同步,便会存储一个故障。
点火缺火识别 (熄火)
熄火不会被直接识别,例如通过气缸内的压力传感器和温度传感器,而是间接通过曲轴的不均匀运转状态(运转平稳性数值)。
在各个气缸中每次点火和燃烧混合气时均会稍稍加速曲轴,并在换气期间又再次将其稍微制动。如果加速力增加,则转速也会增加,直到加速和制动之间重新达到平衡。
针对 8 缸发动机,在 2 个工作周期 (720° 曲轴角) 内进行 8 次燃烧周期。即,每次燃烧可以分配到 90° 曲轴角度的扇形区 (= 点火间距)。因此,燃烧周期可以分配给各个气缸,并可以相互比较。如果所有气缸都达到理论上的均匀燃烧,那么每个扇形区/每个气缸的燃烧周期持续时间始终都是相等的。
6 缸发动机示例:在 2 个工作周期内 (720° 曲轴角度) 进行 6 次燃烧周期。每次燃烧可以被分配 120° 曲轴角度的扇形区 (720° 除以 6 = 120°)。
例如下列原因可能导致运转平稳性数值升高:
- 喷油量偏差 (喷油嘴故障)
- 混合气浓度偏差 (过剩空气)
- 缓慢的燃烧(火花塞、点火线圈)
- 不同的汽缸进气(例如进气道积碳、过剩空气)
- 不同的压缩、缺少压缩
- 不一致的气缸列增压(废气涡轮增压器)
当达到某个特定的运行平稳性数值时 (综合特性曲线值作为发动机转速、负荷和冷却液温度的函数),可以认定存在熄火 (最可能的原因)。当熄火达到一定次数时 (失火计数器),将存储下类型为“识别到气缸 1 熄火”的故障。
为保护触媒转换器,可能需要额外关闭相应气缸上的燃油喷射。
但对于熄火,该故障记录的实际故障原因并不明确。即使存储了例如气缸 1 熄火,该气缸 1 上的部件仍有可能没有故障。
平均值与较高的加速度的偏差得到正的运转平稳性数值。平均值与较高的减速度的偏差得到负的运转平稳性数值。
故障查询时将在测试模块中对各个气缸的运转平稳性数值进行分析,并显示在各个控制单元功能中。为了产生有说服力的数值,发动机必须在怠速下运行至少 3 分钟。但是,运转平稳性数值显示功能必要时仅在怠速下工作,与发动机温度无关。可识别单个燃烧不良的气缸。个别气缸运转平稳性数值的偶然波动可以通过详细观察数值来识别。
一个周期 (720° 曲轴) 的运转平稳性数值总和在恒定转速下为 0。实际上,会出现与总和值 0 较小的偏差。这重新又会导致通常几乎难以察觉的小转速波动。
不良路段识别
不良路段识别根据传输给 DME 的各个车轮的加速度识别在不良路段上的不良路段运行 (驶过石头、碎石或坑洞)。
车轮转速波动可引起驱动系内的振动,并导致类似于熄火的曲轴不均匀运转状态。
在识别到不良路段时会存储一个故障并短时关闭点火缺火识别。出现的运转平稳性数值大概率是由驱动系振动,而不是由熄火引起的。
如果不良路段识别工作太晚 (直至错误地识别到熄火之后),则存在关于熄火和不良路段识别的故障记录。在这些情况下,应忽略关于熄火的故障记录,不需要任何维修措施。
网站声明 1、本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享。
2、本网站所提供的信息,只供参考之用,本网站不保证信息的准确性、有效性、及时性和完整性。
3、如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,bmw@bmwche.cn 我们会及时修改或删除。
2、本网站所提供的信息,只供参考之用,本网站不保证信息的准确性、有效性、及时性和完整性。
3、如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,bmw@bmwche.cn 我们会及时修改或删除。






