宝马新7系G11/G12底盘车型的行驶动态管理系统解析(6)
BMWCHE
/2015-12-23
/技术解析/阅读:次
五、Executive Drive Pro
之前已为大家所熟知的选装配置自适应驾驶系统在 G11/G12 上被后续开发的底盘系统“Executive DrivePro”所取代。
为在确保较高行驶舒适性的同时实现完美行驶动力性,选装配置底盘套件“Executive Drive Pro”的不同行驶动态协调控制系统相互联网。通过很多传感器读取垂直动态管理平台 VDP 控制单元的信息并将相应控制指令发送给不同执行机构。在此会尽早识别出前方的不平路面和障碍物并采取适当应对措施。
下图提供了整个系统的概览。
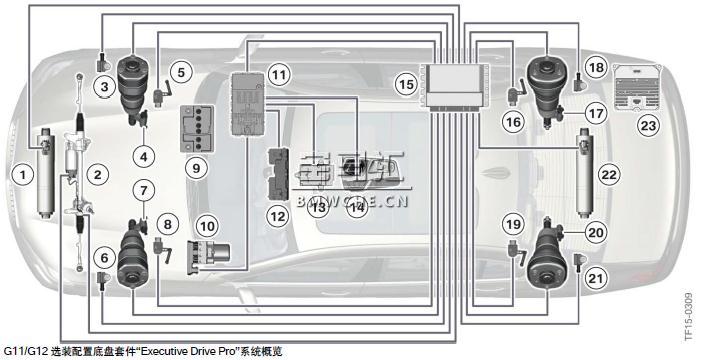
1 前桥电动主动式侧倾稳定杆 EARSV(选装配置“Executive Drive Pro”SA 2VS)
2 电子助力转向系统 EPS(电动机械式助力转向系统)
3 右前车轮加速度传感器(选装配置“Executive Drive Pro”SA 2VS)
4 右前减振器调节装置调节阀
5 右前车辆高度传感器
6 左前车轮加速度传感器(选装配置“Executive Drive Pro”SA 2VS)
7 左前减振器调节装置调节阀
8 左前车辆高度传感器
9 12 V 蓄电池(选装配置“Executive Drive Pro”SA 2VS)
10 动态稳定控制系统 DSC
11 车身域控制器 BDC
12 立体摄像机(选装配置“Executive Drive Pro”SA 2VS)
13 碰撞和安全模块 ACSM-Low
14 驾驶体验开关
15 垂直动态管理平台 VDP
16 右后车辆高度传感器
17 右后减振器调节装置调节阀
18 右后车轮加速度传感器(选装配置“Executive Drive Pro”SA 2VS)
19 左后车辆高度传感器
20 左后减振器调节装置调节阀
21 左后车轮加速度传感器(选装配置“Executive Drive Pro”SA 2VS)
22 后桥电动主动式侧倾稳定杆 EARSH(选装配置“Executive Drive Pro”SA 2VS)
23 电源控制单元 PCU(选装配置“Executive Drive Pro”SA 2VS)
选装配置底盘套件“Executive Drive Pro”包含以下附加组件:
• 所有四个车轮托架上的车轮加速度传感器
• 前桥和后桥电动主动式稳定杆
• 一个附加 12 V 蓄电池和一个 DC/DC 转换器
• 风挡玻璃内的一个立体摄像机。
出于以下原因,选装底盘套件“Executive Drive Pro”时使用车轮加速度传感器:
• 可实现电动主动式侧倾稳定杆 EARS 更精准的干扰参数调节。避免在不平路面上从一个车轮到另一个车轮进行所谓的“复制”过程。
• 通过车轮加速度传感器探测车轮移动并通过车辆高度传感器探测车身移动,可实现电子减振器控制系统 EDC 的精准调节。
对两种信息进行处理可实现简化型碰撞和安全模块控制单元型号(ACSM-Low)的使用。
(1)前瞻式调节
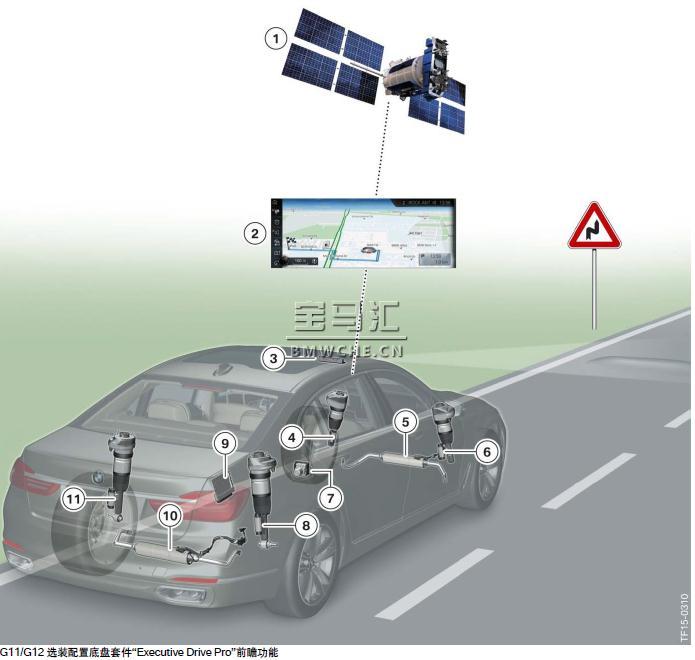
1 卫星式控制单元
2 导航数据
3 立体摄像机(KAFAS 摄像机 3)
4 左前可调试减振器
5 前桥电动主动式侧倾稳定杆 EARSV
6 右前可调式减振器
7 动态稳定控制系统 DSC
8 右后可调式减振器
9 垂直动态管理平台 VDP 控制单元
10 后桥电动主动式侧倾稳定杆 EARSH
11 左后可调试减振器
为使车辆能够尽早针对不同路面情况做好准备,通过不同控制单元读取并处理以下数据从而执行前瞻功能:
• 如果之前通过驾驶体验开关启用了自适应驾驶模式,动态稳定控制系统 DSC 控制单元就会对导航数据进行处理从而分析路段情况并在必要时对需要启用的驾驶模式施加影响。例如车辆以较高车速驶近急转弯时,动态稳定控制系统 DSC 就会在无需驾驶员操作的情况下启用运动模式。垂直动态管理平台 VDP 读取该信息并根据控制模式要求控制相应底盘组件。反之,驾驶员模式也可自动从“运动”切换到“舒适”。如果车辆快速行驶离开多弯路段后以恒定车速在直线行驶路段上行驶,系统就会自动切换为“舒适”驾驶模式。因此系统可根据驾驶方式和预计路段情况,在无需手动操作驾驶体验开关的情况下,针对舒适性(舒适模式)和行驶动力性(运动模式)自动调节最佳驾驶模式。
无需为此启用目的地引导功能。
• 无论选择哪个驾驶模式,垂直动态管理平台 VDP 都会读取风挡玻璃内立体摄像机的信息并对其进行处理。
此外,垂直动态管理平台 VDP 控制单元还会读取很多其他信息例如驾驶风格分析并用于对标配安装的电子减振器控制系统 EDC 和电动主动式稳定杆 EARS 进行前瞻式调节。
因此可通过前瞻方式从而以更加舒适的方式克服 前方障碍。驾驶员不会明显感觉到路面不平。车身的垂直移动应较少,因为底盘以智能和前瞻方式对不平路面做出响应。
因此选装配置底盘套件“Executive Drive Pro”具有以下优点:
• 减少弹簧压缩和伸长(EDC)
• 减少俯仰移动(EDC)
• 车身后续振动衰减更加迅速(EDC)
• 通过主动式侧倾稳定装置确保转弯行驶时动力性较高(EARS)
• 通过分离两个稳定杆部分从而避免“复制”路面干扰确保直线行驶时舒适性较高(EARS)。
在以下驾驶体验开关位置处,底盘套件“Executive drive pro”功能具有不同特性。
驾驶体验开关位置 电动主动式侧倾稳定杆 EARS 电子减振器控制系统 EDC
通过智能化系统联网可在某一传感器系统例如立体摄像机因视野不佳而失灵时通过其他可用传感器进行有效补偿。因此在所有情况下均可获得极高行驶舒适性和行驶动力性。
下图所示为 G11/G12 选装配置底盘套件“Executive Drive Pro”不同调节组件的输入输出图。
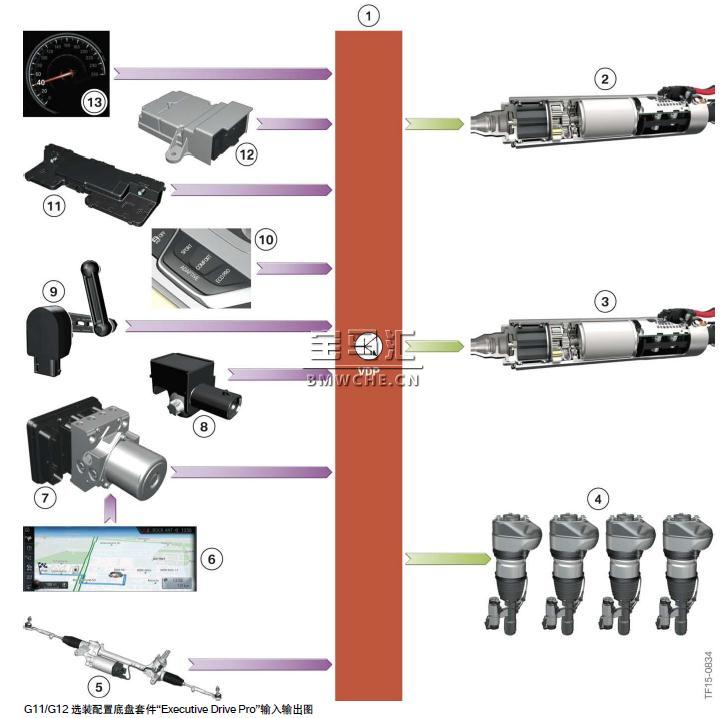
1 垂直动态管理平台 VDP
2 前桥电动主动式侧倾稳定杆 EARSV
3 后桥电动主动式侧倾稳定杆 EARSH
4 电子减振器控制系统 EDC(四个)
5 转向角(EPS)
6 导航数据
7 车轮转速(DSC)
8 车轮加速度
9 车辆高度
10 驾驶模式
11 路面情况(立体摄像机)
12 横向加速度,纵向加速度和横摆率(ACSM-Low)
13 车速
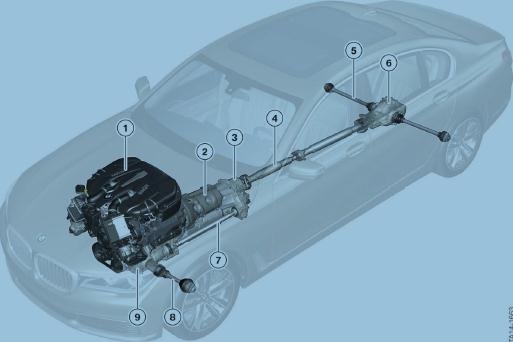
(2)电动主动式侧倾稳定杆 EARS
作为全球首开先河的汽车制造商,BMW 用电动主动式稳定杆取代了之前所用的液压主动式稳定杆。选装配置“Executive DrivePro”(SA 2VS)内的电动主动式稳定杆通过有针对性地利用一个电机向各个稳定杆部分施加机械力矩可减少转弯行驶时的车身侧倾。
下图以示意图形式对主动式液压稳定杆和主动式电动稳定杆进行了系统比较。
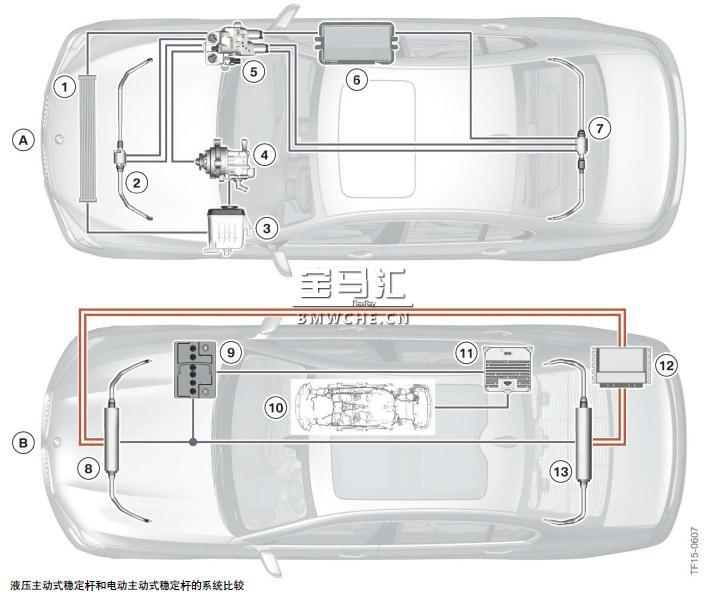
A 液压主动式侧倾稳定杆 ARS(F01/F02)
B 电动主动式侧倾稳定杆 EARS(G11/G12)
1 机油冷却器
2 前桥液压主动式侧倾稳定杆 ARS
3 补液罐
4 液压泵
5 阀体
6 垂直动态管理系统 VDM 控制单元
7 后桥液压主动式侧倾稳定杆 ARS
8 前桥电动主动式侧倾稳定杆 EARSV
9 12 V 蓄电池(车载网络支持措施)
G11/G12 底盘
6. 行驶动态管理系统
110
索引 说明
10 车载网络
11 电源控制单元 PCU(500 W DC/DC 转换器)
12 垂直动态管理平台 VDC 控制单元
13 后桥电动主动式侧倾稳定杆 EARSH
主动式稳定杆电气化具有以下优点:
• 便于集成到“全混合动力”动力传动系内可在纯电动行驶期间进行主动式侧倾稳定。
• 便于在直线行驶期间分离两个稳定杆部分可通过避免“复制”路面干扰改善行驶舒适性。
• 提高效率
只在调节过程期间需要能量,无需像液压系统那样持续保留能量。
施加在稳定杆内电机上的复位力可部分转化为电流并输送回车载网络。
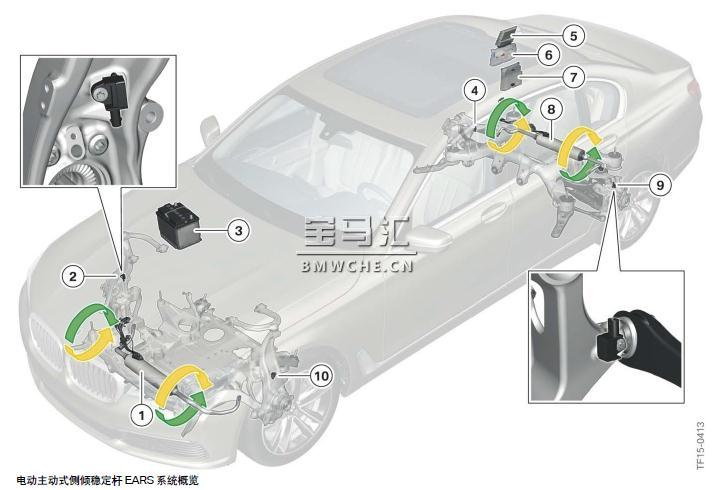
1 前桥电动主动式侧倾稳定杆 EARSV
2 右前车轮加速度传感器
3 发动机室 12 V 蓄电池(车载网络支持措施)
4 右后车轮加速度传感器
5 垂直动态管理平台 VDP
6 右后配电盒
7 电源控制单元 PCU(500 W DC/DC 转换器)
8 后桥电动主动式侧倾稳定杆 EARSH
9 左后车轮加速度传感器
10 左前车轮加速度传感器
主要体现在提高行驶舒适性方面的一个特殊优势是可避免所谓的“复制”过程。在直线行驶受到路面激励时,可使电动主动式侧倾稳定杆左右两侧几乎分离,从而基本上避免复制振动。
因此电动主动式稳定杆可弥补传统稳定杆的不足之处。
计算以下参数主要用于控制电动主动式稳定杆。
• 当前横向和纵向加速度
• 车速
• 转向角
• 车轮加速度
• 车辆高度。
通过快速处理数据和控制电动主动式侧倾稳定杆 EARS 可迅速抵消出现的侧倾力矩(Mw)。
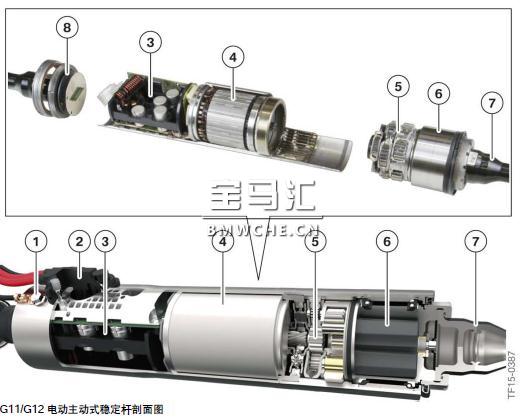
1 接地点
2 电气接口
3 控制单元(EARSV/EARSH)
4 电机
5 三级行星齿轮箱
6 隔离元件
7 稳定杆连杆
8 力矩传感器
主动式稳定杆接收垂直动态管理平台 VDP 的调节请求。两个主动式稳定杆控制单元(EARSV/EARSH)读取并处理总线电码。通过控制电机使两个稳定杆部分相对扭转。在永励式同步电机内进行集中能量转化,通过设定的旋转磁场对电机的转动方向、扭矩和转速进行调节。
通过按 1 : 158 传动比将电机扭矩转化为待传输稳定杆扭转力矩的三级行星齿轮箱进行动力传输。在G11/G12 上,目前可提供最大 750 Nm 稳定杆扭转力矩。在此系统采用更高扭转力矩设计,从而补偿因路面激励形成的叠加。
在此,行星齿轮箱与稳定杆扭转弹簧间的弹性体隔离元件负责以较低幅度分离高度动态的路面激励。这样有助于进一步实现较高舒适性目标。
组件内部的一个力矩传感器将当前调节力矩反馈给控制单元。通过检查数据可信度可识别出不同故障并存储相应的故障代码存储器记录。但无法进行组件维修。出现机械性部件故障时必须整个更换主动式电动稳定杆。
由于主动式电动稳定杆将来也会应用于其他车型,必须在安装后(通过可变设码)在车上进行控制单元自适应。这样可确保电动主动式稳定杆提供与车辆相符的调节力矩。
技术数据
下表概括了电动主动式稳定杆的技术数据。
最大耗电量和最大输出电流数据为短时数值。
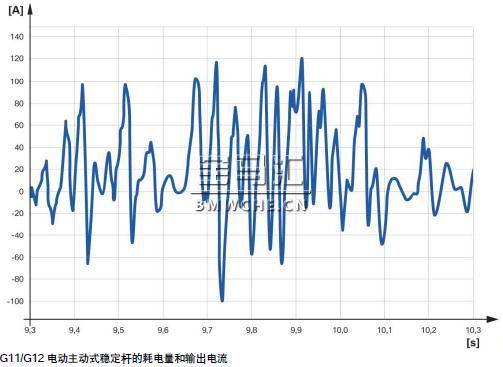
上图展示了以约 30 % 能量回收利用进行驾驶操控时电动主动式稳定杆的耗电量和输出电流。需要注意,该图所示为瞬间情况。根据驾驶操控,电动主动式稳定杆的控制功率与能量回收利用功率存在显著差异。
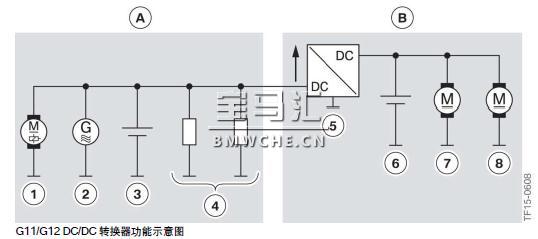
A 12 V 车载网络
B 电动主动式稳定杆用电器
1 起动机
2 发电机
3 12 V 蓄电池
4 12 V 车载网络用电器
5 电源控制单元 PCU(500 W DC/DC 转换器)
6 发动机室 12 V 蓄电池(车载网络支持)
7 前桥电动主动式侧倾稳定杆 EARSV
8 后桥电动主动式侧倾稳定杆 EARSH
为使 G11/G12 12 V 车载网络用电器不受两个电动主动式稳定杆较高负荷电流的影响,通过一个 DC/DC转换器(500 W)使稳定杆与基础型车载网络分离。
所需控制能量由位于发动机室内的一个附加 12 V 蓄电池提供。因此不会由于能量消耗较高影响其他用电器。
该蓄电池是一个附加蓄电池,可根据车辆配置为车载网络提供能量。因此车辆未配备主动式电动稳定杆时也可使用该蓄电池。
(3)调节策略
通过前桥和后桥稳定杆可显著影响转弯行驶性能。在此,前部与后部车桥间的侧倾力矩比例起到了决定作用。该比例取决于两个车桥的具体稳定杆力矩。
下表概括了可能的侧倾力矩比例和由此获得的车辆行驶性能。
下图展示了两个车桥主动式稳定杆的稳定杆力矩分配比例(侧倾力矩比例)。
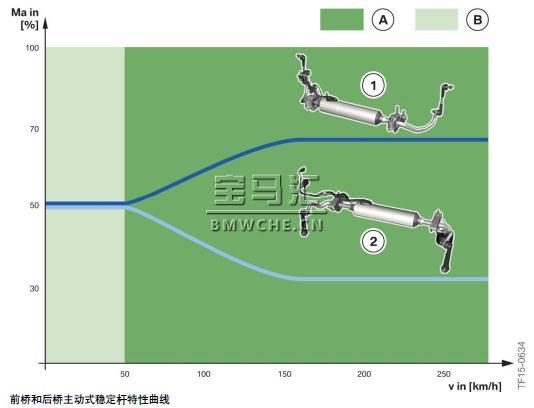
A 不足转向侧倾力矩比例
B 中性侧倾力矩比例
Ma in [%] 主动式稳定杆力矩分配百分比
v in [km/h] 车速(km/h)
1 前桥主动式稳定杆
2 后桥主动式稳定杆
采用主动式稳定杆时可根据具体行驶情况调节侧倾力矩比例从而提高行驶动力性。低速行驶期间(0 ~50 km/h),侧倾力矩比例为 50 : 50(中性)。车速提高时,朝“不足转向”方向调节侧倾力矩比例。
通过主动式稳定杆施加侧倾力矩会对可传递的车轮侧向力产生影响。
下图展示了转弯行驶时根据所施加稳定杆力矩可传递的最大侧向力。
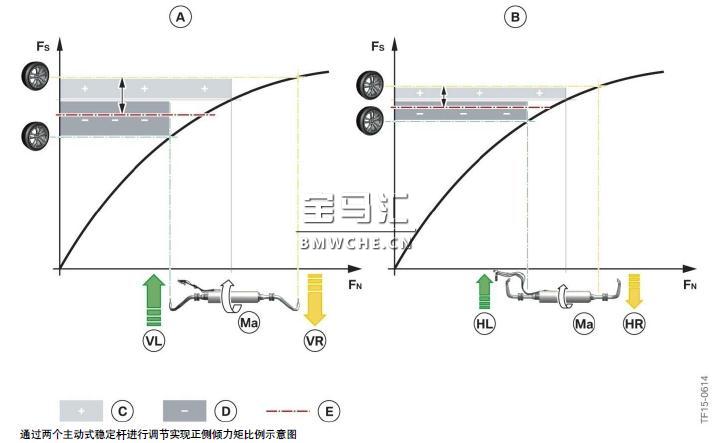
A 前桥主动式稳定杆力矩较大
B 后桥主动式稳定杆力矩较小
C 可传递的车轮侧向力提高
D 可传递的车轮侧向力减小
E 可传递的某一车桥车轮侧向力的合力
FS 可传递的车轮侧向力
FN 车轮支承力
HL 左后车轮主动式稳定杆作用力
HR 右后车轮主动式稳定杆作用力
Ma 主动式稳定杆力矩
VL 左前车轮主动式稳定杆作用力
VR 右前车轮主动式稳定杆作用力
转弯行驶时,通过主动式稳定杆反力矩(Ma)抵消施加作用的侧倾力矩(Mw)。在此根据主动式稳定杆所施加力矩(Ma)提高或降低不同车轮的车轮支撑力。
一个车轮承受非常高的主动式稳定杆作用力时,其可传递侧向力会由于车轮支撑力较高而提高。但另一侧车轮负荷减轻,因此其侧向力会由于车轮支撑力较低而减小。由此形成的车轮支撑力合力表示某一车桥车轮的可传递侧向力。
由于主动式稳定杆作用力提高时负荷减轻车轮可传递侧向力会随之减小,其减小程度高于承受负荷车轮可传递侧向力的增大程度,因此该车桥车轮的侧向力合力降低。
对上图两个车桥进行直接比较可以看出,后桥可传递侧向力合力高于前桥。因此在极限范围内车辆前车轮可能会滑移,出现不足转向。
对于没有经验的驾驶员而言,在这种情况下最好还是重新恢复车辆控制而不要进行过度转向(车辆后桥甩尾)。
(4)电动主动式侧倾稳定杆 EARS 系统电路图
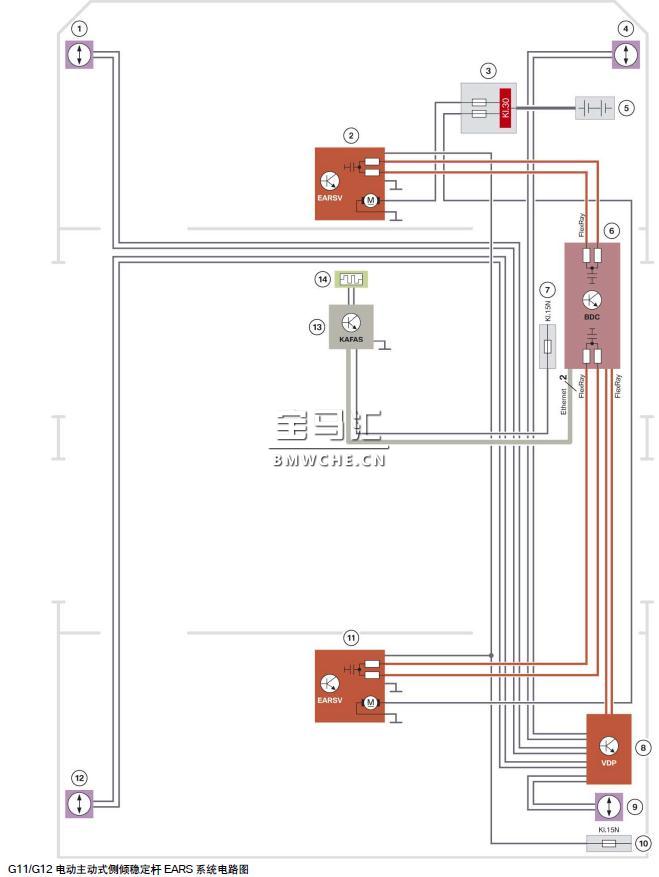
1 左前车轮加速度传感器
2 前桥电动主动式侧倾稳定杆 EARSV
3 发动机室配电盒
4 右前车轮加速度传感器
5 发动机室 12 V 蓄电池(车载网络支持措施)
6 车身域控制器 BDC
7 右前配电盒
8 垂直动态管理平台 VDP
9 右后车轮加速度传感器
10 右后配电盒
11 后桥电动主动式侧倾稳定杆 EARSH
12 左后车轮加速度传感器
13 KAFAS 摄像机控制单元
14 立体摄像机
网站声明 1、本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享。
2、本网站所提供的信息,只供参考之用,本网站不保证信息的准确性、有效性、及时性和完整性。
3、如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,bmw@bmwche.cn 我们会及时修改或删除。